12面体を激しく転がしても、手から落とさない器用さ。
かつて車輪型にトランスフォームするクモ型ロボットや、ロボット界にカンブリア爆発を起こした、アノマロカリス型ロボットを作ったFESTO(フエスト)が、今度はバイオニック・ソフト・ハンドとアームを開発しました。
彼らはドイツで空気圧機器および次世代オートメーション技術の開発を行なっている会社なので、こうしたものが得意なのです。
人間と同じように一瞬で計算
人間が物を拾うには、その寸前の一瞬でいかに安全に掴めるのか、脳内で膨大な計算が行なわれます。これは長年の幼児期の発達と学習の結果から来る潜在意識的なアプローチなのですが……現在ロボット工学の研究者達は、それを彼らの発明のために使っています。
このバイオニック・ソフト・ハンドはとても器用なだけでなく、AIを使って指を動かす前に、そうした計算で物体を適切に扱うのです。
柔らかさで人に優しく
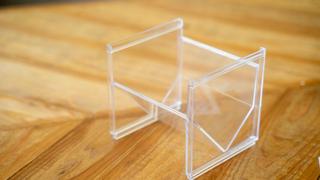
バイオニック・ソフト・ハンドは、ロボット工学に「柔らかさ」というアプローチを採り入れています。たとえば工場のラインで働く産業用ロボット・アームは、鋼鉄の塊で出来ており、重い物を持って動かせるよう強靭に作られています。なので作業中に人間が接触すると大怪我を負ってしまうことも。それらとは対照的に、FESTOのロボットは柔らかく作られています。素材はスマート・ファブリックや膨張する浮袋のようなものが使われているので、人間との接触で怪我を負わせる心配がありません。
加えて最大限の安全性のために、FESTOの新しいバイオニック・ソフト・ハンドは堅い骨格構造を内部に持っていません。その代わり、空圧で膨らむ蛇腹が弾性線維で編まれた表皮に包まれ、ロボット・ハンドの動作を生み出すのです。これは人間の手にある筋肉や腱のシステムに似た働きをしますが、柔らかい部品は人間が直接触っても安全であることを意味します。
触覚を持つロボットの手
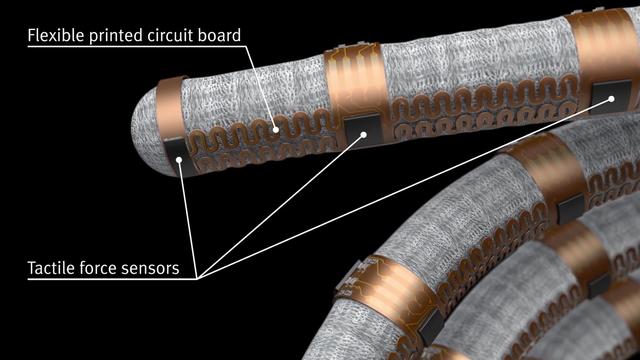
指先には慣性(移動)センサーと力覚センサーが、柔軟な基盤と電線を伝って配備されています。これらのセンサーは、手や指が動いているときだけでなく停止したときでも、ロボットの制御システムにフィードバックを提供し、物体に接触したこと、または物体が動かせない位置にあることを知らせてくれます。それらは本質的に、触覚を提供しているわけで、ロボット・ハンドの能力を考えると重要な要素なのです。
対して工場出荷時のロボット・アームとマニピュレーターは、非常に特殊な動きを際限なく繰り返すよう予めプログラムされています。実行中のタスクの分量の変更などもできますが、やはり主軸は手で同じ物体を掴み、決められた位置に移動させることとなっています。
学習は仮想世界で何十億回も行なう
バイオニック・ソフト・ハンドは、人間のように物体を掴みんで操り、タスクを実行する方法をすべて自分自身で学習可能です。この作業は現実世界での危険が起こらないよう、仮想的なトライ&エラーを通じて行なわれます。
たとえば幼児の頃、あなたはミルクの入った哺乳瓶をちゃんと掴んで飲めるようになるまで、100回くらい落っことしたかもしれません。ですがバイオニック・ソフト・ハンドは、AIと機械学習を搭載したデジタル・ツイン(仮想世界で現実の状況を再現・訓練)を使用して、現実世界で一度も哺乳瓶を落とすことなく、仮想的に何十億回もの間違いを犯すことができます。
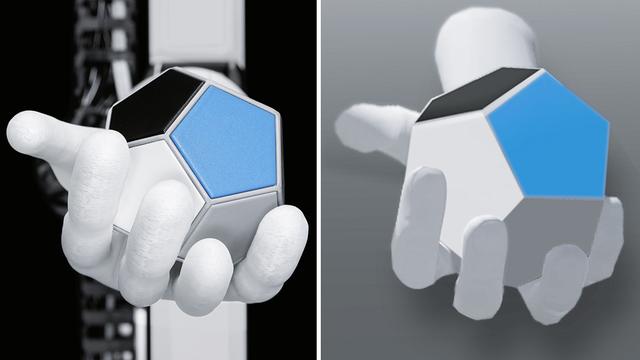
たとえば12面体を持たせたロボットには、常に手の中で特定の面が上を向くようプログラムするなど決まった目標があります。しかしながら、手指の動かし方は教えられていません。深度計測カメラが、現実世界でロボットにどう指を動かしたら良いのかを考えさせる、デジタルの複製を作るのです。そして、最適解に導かれるまで、仮想の手指に無限ともいえる何通りもの動かし方を考えさせることになります。これにより、幼児よりずっと速く物体の掴み方や操り方を学ぶことができ、新たな挑戦に臨めるのです。
柔らかアームもある
こちらは同じく、FESTOが同時に発表したバイオニック・ソフト・アームです。先端は何種類ものアタッチメントに付け替えられるようですが、ハンドとの組み合わせが最強なんじゃないでしょうか?
このロボットが1台あれば、家中にある無数のタスクを実行できそうですね。