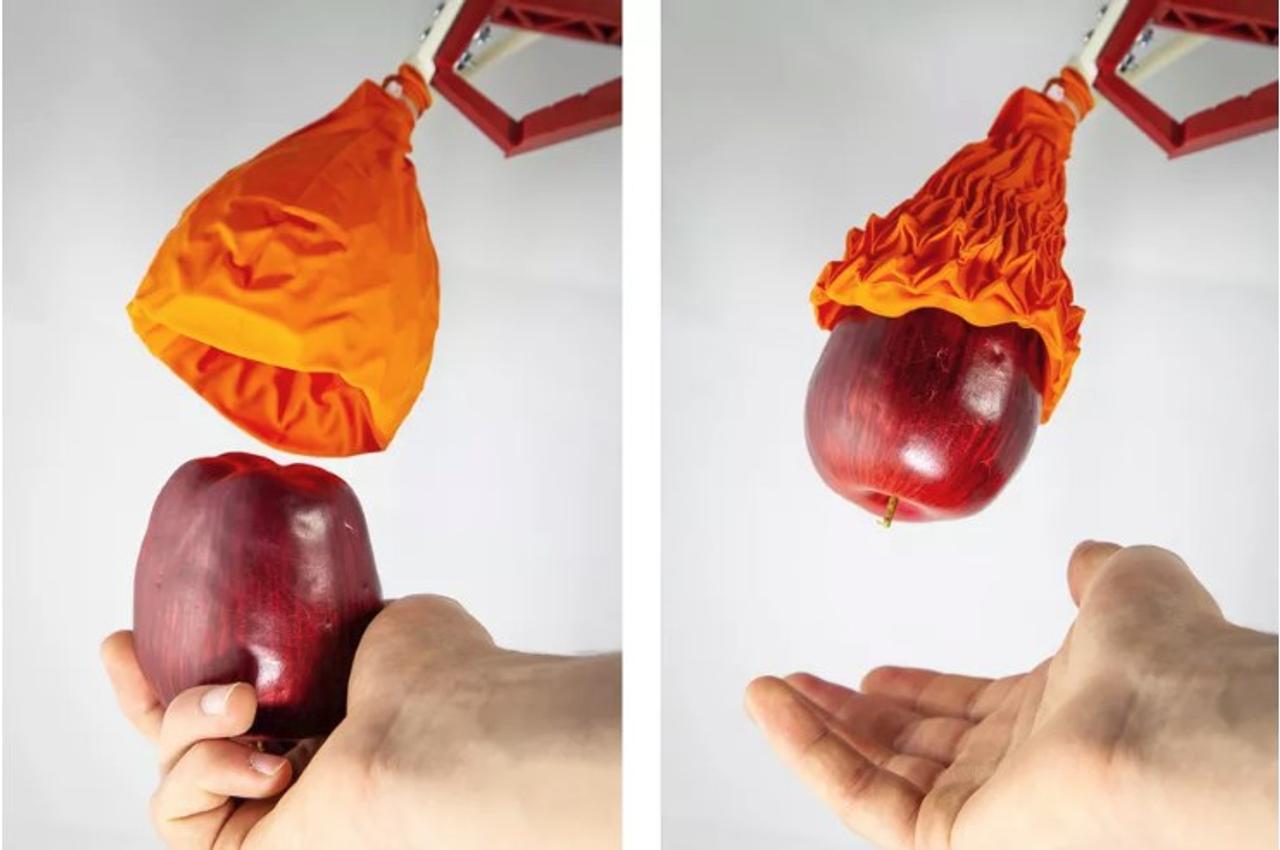
ガス圧で折り紙の花が開いて物を掴みます。
一言でロボット・アームというと、先に付いている手は大体が「C」の形の2本指か、最先端だと5本指のものをイメージすると思います。
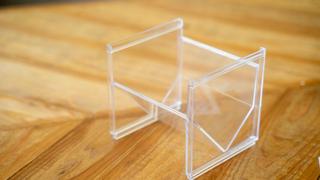
ですがMITコンピュータ科学・人工知能研究所(CSAIL)のダニエラ・ラス教授率いるチームは、折り紙にインスパイアされたチューリップの花のようなロボット・ハンド「Origami Robot Gripper(折り紙・ソフト・グリッパー)」を作りました。
これはガス圧でハンド部分を広げたりしぼめたりして物を掴むのですが、しぼんだときに折り紙の構造が活かされているのが見て取れます。
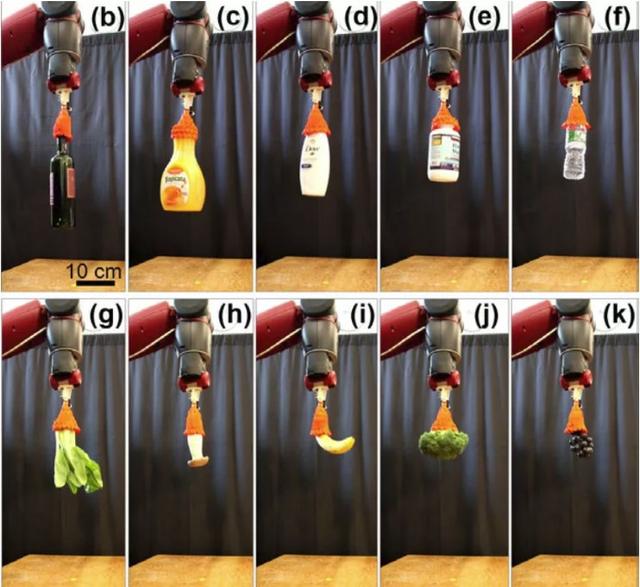
従来のロボット・ハンドだと、持ったものを潰してしまうとか、形状的に持てないという難点がありました。しかしTHE VERGEいわく、このハンドだと掴んだものを傷付けることなく、自重の100倍の重さを持ち上げられるそうな。
中の骨格は硬い素材で作られていますが、ゴム製のスキンを使っています。このゴム製のスキンによって、物体を優しく包みつつ、滑らないでシッカリ掴めるのでしょう。
ロボット・ハンドの世界では、これまでにもボール型や触手型のなど、手の形以外をしたものがアレコレ作られてきましたが、教授はこのメカニズムとデザインが最も優れていると自負してるんだとか。
まだまだ工場などに配備されるまで時間がかかるでしょうが、いつかお目にかかれるかもしれませんね。