このまま未来に帰りそう!?
映画『バック・トゥ・ザ・フューチャー』シリーズで爆発的に知名度を上げた、DMC社の自動車デロリアンこと「DMC-12」。このカルト的人気を誇るクルマが、スタンフォード大学のダイナミック・デザイン研究所の手により、自律運転をするEVに改造されました。
ドリフトで大爆走
そして劇中でマイケル・J・フォックスが演じた主人公マーティーにちなみ、このEVは「MARTY」と名付けられ、複雑なコースをドリフト走行で爆走するデモ動画が公開されました。
狭いコーンの隙間を正確に横滑り。ドリフトキングと呼ばれる人間のドライバーでも、いくつか倒しちゃうかもしれませんね。
この走行は、車載コンピューターが十数回の試走で自動車のレスポンスを計測し、それを技術者がソフトウェアに変換することで実現した、とStanford Newsで書かれています。MARTYは時速50kmで走行し、+/- 40度にケツ振りするのに約1秒がかかるとのこと。
すべては自律運転車の安全のため
この「MARTY」を作ったクリス・ゲルデスさんは、開発の目的をこう話しています。
私たちは、タイヤと路面の間の摩擦をすべて利用して、車を危険から救い出せる自動運転車を開発したいと思っています。物理法則の範囲内で避けられる事故を、回避できる車にしたいのです
要するに、危険回避のためにドリフト走行をさせることにしたんですね。
横滑りは、かなりエクストリームな回避方法ではあるものの、事故直前にハンドルを切れば、自然と横滑りになることも大いに有り得ます。それにブレーキによる減速だけでなく、タイヤとアスファルトとの摩擦も、減速を手助けします。
障害物を前にして、ブレーキによる減速で止まる安全機構はアレコレ作られていますが、それらは車両が不安定な状態になるのを制御しようとします。でもスタンフォード大学の手法は、その不安定性を利用して、より機敏で正確な方法で車を操縦し、コンピューターによる故意的なドリフトで事故を回避する逆のアプローチなのです。よほどの緊急事態に限られると思いますが、イカした制動方法ですよね。
もし自律運転車が両者の制御方法を習得したら、今よりもっともっと安全になるんじゃないかと思われます。
「MARTY」の改造点
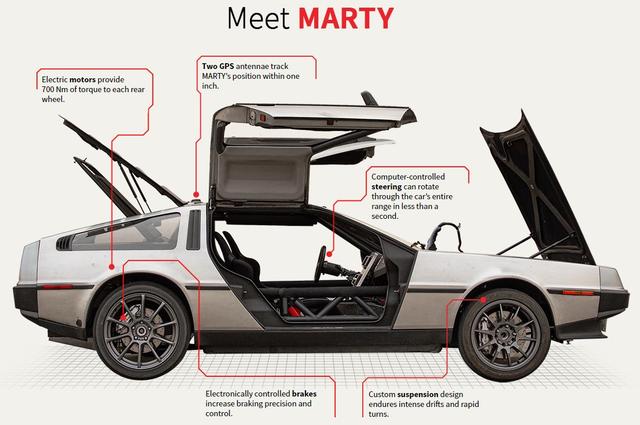
「MARTY」には後輪ふたつに700Nmのトルクを発生させる電気モーターがひとつずつ搭載され、ホイール内には電動制御ブレーキと、ドリフト走行のために固めの特注サスペンションが交換されているとのこと。そしてパワー不足を補うため、Renovoが開発した丈夫なバッテリーと電気モーターに換装されています。加えてハンドルがコンピューター制御で、一番端から逆の端まで1秒未満という早業で回されます。
また天井にはふたつのGPSが搭載され、車両の位置を1インチ以内の誤差で追跡し、シートの後ろにあるコンピューターが数秒でスムーズなドリフト走行のコースを計算するのです。
メイキング映像
では動画にて、開発者達による解説とメイキングをどうぞ。
プロのレーサーも「俺の仕事がなくなっちゃうよ」と舌を巻いています。
ドリフトで危機的状況を回避する自律運転車。その将来は、コンピューターが片輪走行で事故を回避するドラテクを憶えたり…?
Source: YouTube (1, 2) , Stanford News via bOinGbOinG