まるでジェダイのフォースのようです。
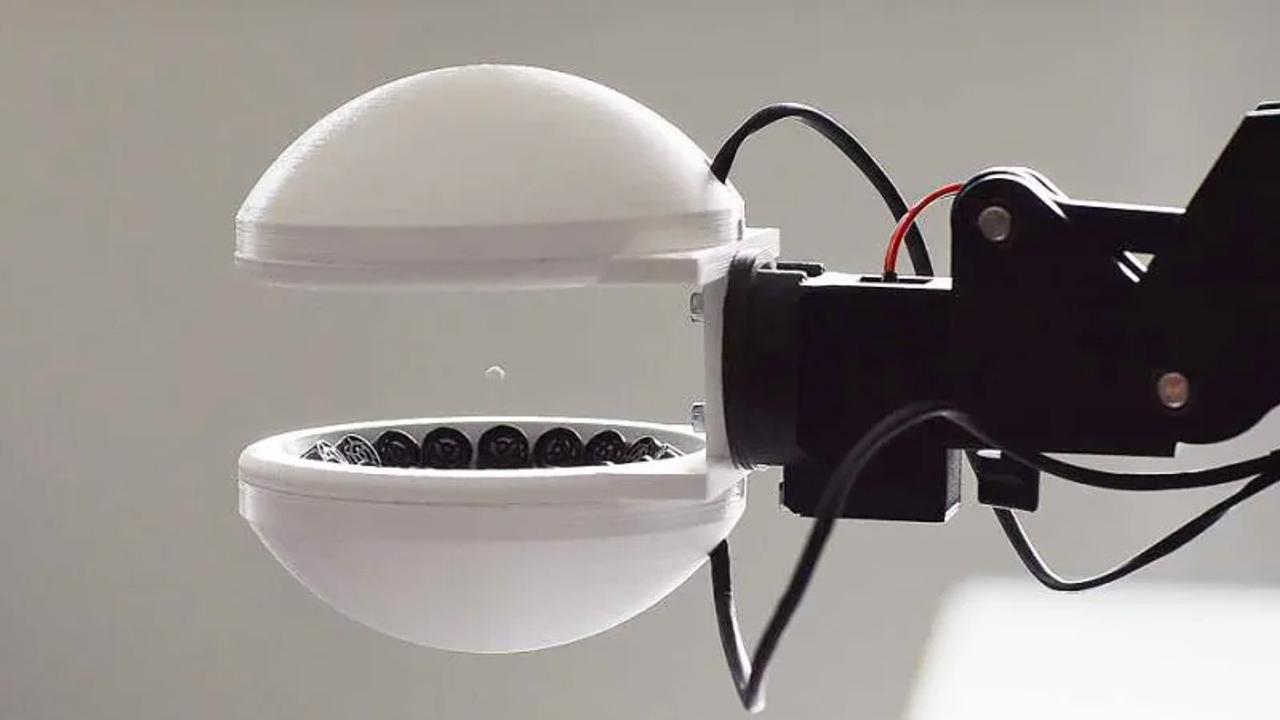
スイス連邦工科大学チューリッヒ校の、元博士の学生であるMarcel Schuck氏は「音響浮揚」と呼ばれる現象を応用し、触れずにつかむロボットアームを開発しました。触れずにつかんで持ち上げて操作できる新しいグリッパーを設計し、小さく壊れやすい部品をつかむことができます。
コンサート会場等で、大きなスピーカーからブーンと鳴る轟きを実際に感じたことはありませんか?それが、ものを音の力で浮かせる音響浮揚の基本原理です。
小さなものが音の力で浮いているように見える!
このロボットアームのグリッパーでは、小さな変換器で人間の耳では感知できない超音波を生成し、複数の音波が交差する場所に圧力ポイントが生成されるように焦点を合わせます。 これらの圧力ポイントを見ることはできませんが、小さなオブジェクトを空中に浮いているように見せることができます。 実は、落合陽一さんも過去に音響浮揚を活用した搬送方法を2013年に研究開発し、グッドデザイン賞を受賞したりしていましたね。
最も繊細な作業ができるロボットアームのグリッパーでさえ、半導体の製造に使われるめちゃくちゃ小さな部品や、複雑なアナログ時計の製造に使用される部品にとっては重すぎる上、汚れてしまうという問題もあります。 微細な汚れや破片はグリッパーから簡単に移動できますが、実際に製品が適切に動作するためにもコンポーネントを清潔に保つことが必要不可欠です。
コスト面でもメリットがある
この超音波グリッパーを開発したSchuck氏は、この技術はコスト的にもメリットがあると言います。 工場用に設計されたロボットは、特定の部品を処理するように特別に設計されています。決められたものとは異なる部品に新たに対応するためには、また設計やプログラムを修正する必要があります。

音響浮揚を用いた技術は、さまざまなオブジェクトを処理するロボット開発のためのキーとなるかもしれません。 ハードウェアは同じままで、ソフトウェアは生成される超音波の強度と周波数を調整して、実際に持ち上げる圧力ポイントのサイズと位置を変更することができます。
現状は、まだ非常に小さく軽いオブジェクトしか対応できませんが、インテリジェントイメージングシステムと組み合わせれば、ロボットは何か違うものをつかむタスクを実行するために、再プログラミングする必要がなくなります。 結果、工場はロボットの改良や再構築に必要なダウンタイムのコストカットができるという話ですね。
しかしながらこのアプローチが実用化されるのはまだ数年先でしょう。音響浮揚という技術は1970年代から既知の現象で、これまでも多くの研究が行なわれてきましたが、めちゃくちゃ小さい物体しか持ち上げられないため実用化はなかなか難しかったのが現状でした。しかし、電子機器の部品の小型化が進んでいる昨今、改めて音響浮揚のロボットアームグリッパーの活路が見いだされるかもしれません。