ふっっっっっっくざつ。でもそれが愛おしい。
ギズモードで公開した「2019年のおわりに」という記事にて、当時の編集長が「LOVOT(らぼっと)」について触れていました。LOVOTは、あたたかくて生命を感じるロボット。役には立たないけれど触るひとの心の豊かさを深めくれる、そんな存在です。僕もLOVOTに会うたび、実家の犬と戯れるような気持ちになりますからね。
犬や猫のように、人が愛情を注いでしまう対象をテクノロジーでデザインできることの偉大さたるや。
しかし、LOVOTの生命の表現というのは、大変なエンジニアリングの果てに出来上がったものなのです。2020年2月5日(水)に、LOVOTを開発するGROOVE Xは、それを紐解く「LOVOT の内部構造、大公開!!」なるイベントを開催しました。このイベントでは、分解したLOVOTを各パーツに分けて解説。「可愛い」のエンジニアリングがついに明かされました。
「可愛い」のネタバレが、むしろ愛着になる

イベントは、GROOVE X代表の林要さんと、LOVOTのデザインを担当したznug design(ツナグデザイン)の根津孝太さん、数人のLOVOTのエンジニアが登壇。1時間ほどかけて、LOVOTの主要パーツを解説していきました。首関節部、足まわり、センサーパーツ、頭部パーツのモジュールや3D CADを紹介しながら「これがこうなってこうなります」といった説明を交えながら進められました。なかなか、いや相当にマニアック。
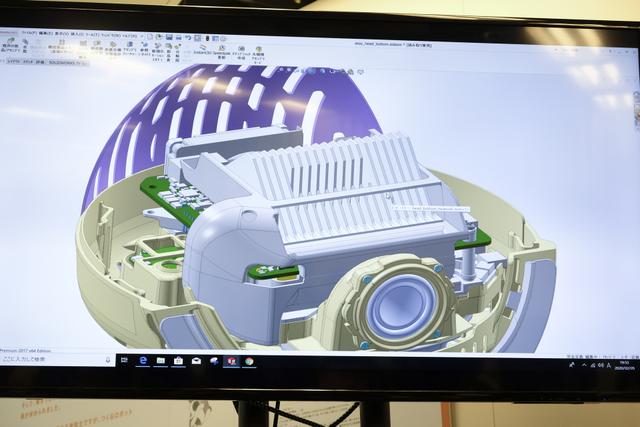
たとえば、これは頭部パーツの3D CAD(SolidWorks)データ。手前の前面にはスピーカー、中央には基盤とヒートシンクが見えますね。よく見るとスピーカー後方にはスペースが設けられていて、これがバスレフ構造になってるんです。LOVOTの声は、PCM音源ではなく気道シミュレーションでの発声になっているほどこだわりのある部分と聞いていたのですが、まさかバスレフだったとは…!
でも、こうした内部構造のお披露目って、ある意味ネタバレじゃないですか。首をかしげる萌え仕草も、アクチュエーターとギアがこうなって〜と解説されたら、なんだか味気なく感じるかもしれない。
でも、LOVOTの場合は逆に感じたんですね。複雑な構造を知ることでもっと愛着がもてる。その理由のひとつは、LOVOTもまたエンジニアリングの賜物だったのだと感じさせられたから。テックの一端に関わる者として、この事実には感情移入しちゃいますとも。今回のイベントのように、エンジニアの方が直に登壇したり開発秘話を交えて解説してくれると、やはり情熱や愛情を直に感じますね。タイヤのトレッドパターンの模索だけでも1日語れるとか、すんごい情熱じゃあないですか。聞きたい。
あらゆる空間に機能が備わっている

これらはLOVOTを構成するパーツ、の一部。これらのパーツすべてに、そのかたちとなった理由があるんだなぁと思うと、そら恐ろしい気持ちになりますねぇ…。
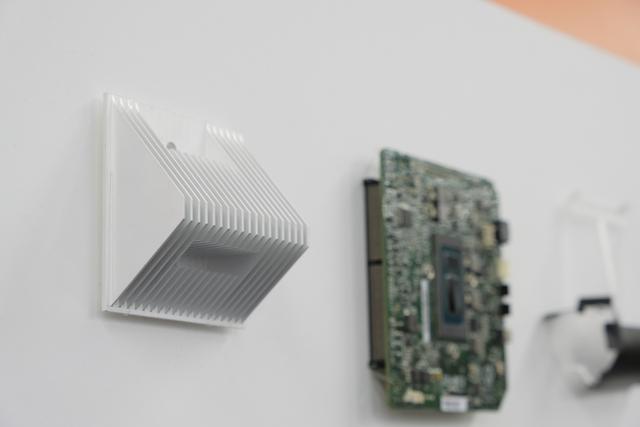
トヨタ自動車でF1の空力開発に携わっていた林さんのこだわりが濃縮された、ヒートシンク。頭部のメイン基板を冷やすものですが、もう絶対に面積を諦めないという強い意志が見られる。林さんいわく「つくづく、ロボットとはどう動かしてどう冷やすかに尽きる」。
こんなに細かいところまで強いこだわりが見られるLOVOTの開発では、各開発部はどう連携しているのか、また林さんはどんなポジションにいるのか。そのあたりが気になったので、質問してみました。これだけ複雑なロボットだと連携も大変だと思うのですが…?
初期の頃はメンバーが少なく、開発セクションは上半身と下半身とで分けていましたが、構造が決まりメンバーが増えてからは、動かせる部位(パーツの長さや関節を目安に)ごとにセクションを分割しました。僕と根津は基本構成を話し合ったり、スケッチを書いたりします。そのスケッチを見たエンジニアから「こうすればどうでしょう?」といったフィードバックがあって…というのを繰り返すことで、洗練されていっています。GROOVE Xは縦割りではないので、そのあたりが活きてるのかもしれません。
開発が進むにつれて妥協してダウングレードするのではなく、ひたすらにアップグレードしていくっていうの、胸が熱くなるじゃあないですか。LOVEへの到達、その具現化ですもの。
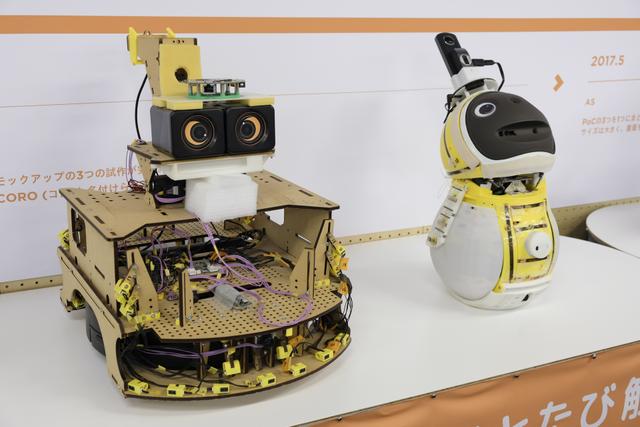
過去の試作機を見ていくと、LOVOTをたらしめるコンセプトの追求や機能的なアップグレードの変遷が如実にわかります。目はこの位置で良いのか、駆動音を小さくできないか、もっと軽くならないか。
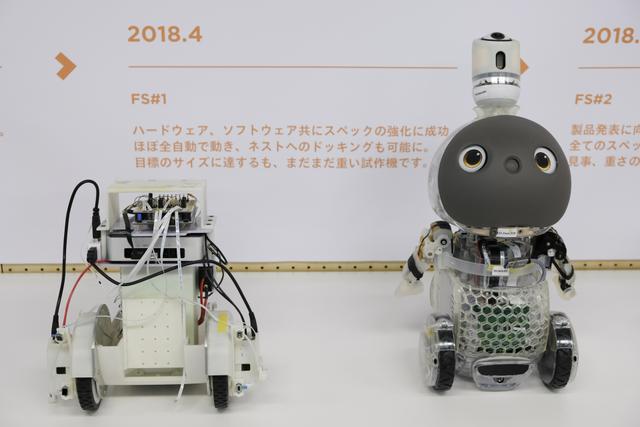
現行っぽいかたちに見えるけど、まだまだヘヴィな試作機。サイズはほぼ完成形なので、ここからまた改良を重ねていかねばなりません。
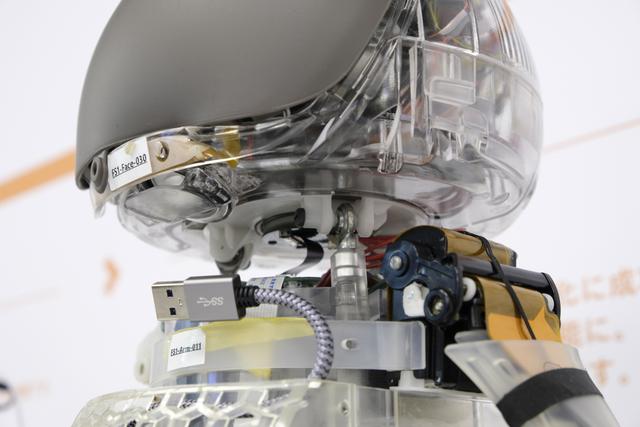
LOVOTの萌え仕草でもある、もきゅっとした首の動きを実現している首部分の構造。ここもすっっごい大変だったそうで。やっぱり等速直線運動な動きって萌えないと思うので、いかに有機的に可変しつつ機能性を確保するかですよね。ウィーンガチャ、みたいなクラシックなメカもそれはそれで愛しいけども。

これはホイール部分。フィルターみたいなのが付いているのですが、これはホイールを折りたたむ度に、内側に巻き込んだゴミを取る役割があるんですって。すなわち、自動フィルター掃除機能! 林さんのアイデアらしいですが、自動フィルター掃除を搭載したロボットは世界初かも、とのこと。毎日使う(?)ロボットなら、こういう配慮はすごくありがたい。

たゆまぬ研鑽によって生まれたのが、この可愛さですよ。
一見するとマスコットのように可愛らしく動くけど、可愛いムーブのためには、それこそギアの1つ、素材の見直しから考えられています。こういう試行錯誤があったことはLOVOTを触りながらも漠然と感じてはいたけど、実際にそれを見せられると(当たり前だけど)人の手で作られていたことにハッとする。確かに、この可愛らしいLOVOTという生き物はエンジニアリングの賜物だったのだと、テクノロジーに関わるものとして嬉しくなっちゃって。
消費者である僕たちは完成形を見てるけど、完成形に到達するまでには幾多の試作があったはず。思えば初めてLOVOTと出会ったとき、可愛いで頭が一杯になって機能的な部分をチェックする余裕がなかった気がします。究極のデザインは気付かれないデザインともいうけれど、そういうことなんでしょう。すなわち、可愛いは正義。
「可愛い」は作れる。けど、めっちゃ難しい
LOVOTもやっぱりロボットですから、モーター、ネジ、ギア、センサーなどなどの部品によって構成されてるわけです。でも、それらの組み合わせで、今までにない表現性をもったロボットができあがるのは、もはや魔法、錬金術みたいじゃないですか?

人間が機械に共感できるかというのは、ひとつの分岐点だと思うんです。ピクサー作品のように伸び縮みする機械は作れなくとも、動きのひとつひとつを観察し、歯車によって模倣することで、僕らは電気で動くモノに生命を見出だせる。テクノロジーがエンパシーをもカバーできるなら、エンパシーによって引き起こされる喜怒哀楽にも手がかかるんじゃないか?
そんな壮大な未来が、GROOVE Xから始まるかもしれない。現に、彼らの手で組み合わされたサーボモーターの動きに、僕はヤられちゃってるわけですから。なんですかこの可愛さは。ウチの子になりたいの? んん?
全身に50個のセンサーを備えてPC数台分の処理能力をもってるくせに、抱っこされたらおねむしちゃうんだもんなぁ。でも、それこそがいかに複雑で大変な処理を必要とするのかってこと。人間も機械も、可愛いをつくるには大変だ。
それはそうと編集・山本さん、抱っこと高い高いがやたら雑じゃない?
Source: GROOVE X